Электроника
Смотреть все
Электроснабжение и СКС
Смотреть все
Оборудование и инструмент
Смотреть все
Средства разработки электроники
Смотреть все
Телекоммуникации и связь
Смотреть все
Электронные компоненты
Смотреть все
Электромеханические компоненты
Смотреть все
Акустические компоненты
Смотреть все
Оптоэлектроника
Смотреть все
Корпусные и установочные изделия
Смотреть все
Источники питания
Смотреть все
Кабельная продукция
Смотреть все
Компенсация реактивной мощности
Смотреть все
Освещение
Смотреть все
Пожарно-охранные системы
Смотреть все
Промышленная коммутация
Смотреть все
Щитовое оборудование
Смотреть все
Электроустановочные изделия
Смотреть все
Измерительные приборы
Смотреть все
Паяльное оборудование
Смотреть все
Электроинструмент
Смотреть все
Ручной инструмент
Смотреть все
Измерительный инструмент
Смотреть все
Расходные материалы
Смотреть все
Пневмоинструмент
Смотреть все
Компьютерное оборудование
Смотреть все
Станки
Смотреть все
Оснастка для инструмента
Смотреть все
Домашняя электроника
Смотреть все
Датчики
Смотреть все
Диоды
Смотреть все
Дроссели и индуктивности
Смотреть все
Компоненты подавления ЭМП
Смотреть все
Конденсаторы
Смотреть все
Микросхемы
Смотреть все
Полупроводниковые модули
Смотреть все
Резисторы
Смотреть все
Резонаторы, генераторы и фильтры
Смотреть все
Тиристоры (триаки)
Смотреть все
Транзисторы
Смотреть все
Трансформаторы
Смотреть все
Устройства защиты, предохранители
Смотреть все
Кабельные наконечники и клеммы
Смотреть все
Клеммники
Смотреть все
Панельки и зажимы для компонентов
Смотреть все
Переключатели, кнопки
Смотреть все
Переходники
Смотреть все
Разъёмы и соединители
Смотреть все
Реле
Смотреть все
Дисплеи, индикаторы и тачскрины
Смотреть все
Светодиоды
Смотреть все
Фоточувствительные элементы
Смотреть все
Аксессуары для кабеля
Смотреть все
Лампы осветительные
Смотреть все
Вспомогательное оборудование
Смотреть все
Газовые паяльники и горелки
Смотреть все
Запчасти к паяльному оборудованию
Смотреть все
Расходные материалы для пайки
Смотреть все
Пилы, электрические ножницы
Смотреть все
Шлифмашины
Смотреть все
Абразивный инструмент
Смотреть все
Оптические приспособления
Смотреть все
Приспособления для хранения
Смотреть все
Режущий инструмент
Смотреть все
Слесарный инструмент
Смотреть все
Шарнирно-губцевый инструмент
Смотреть все
Электромонтажный инструмент
Смотреть все
Химические средства
Смотреть все




Изображение служит только для ознакомления, перед покупкой уточняйте точные характеристики в технической документации!
УТ003266256
Нет отзывов
Slamtec RPLIDAR A1 Laser Ranging Sensor, 360° Omnidirectional Lidar
Slamtec RPLIDAR A1 Laser Ranging Sensor, 360° Omnidirectional Lidar
- Производитель: Waveshare Electronics
-
Под заказ
- Самовывоз через 7-9 недель
- Отправка возможна 26 февраля
Минимальный заказ от 1 шт
Кратность заказа
1 шт
28 155,10 ₽
Доставка курьером по Москве (в пределах МКАД)
Ориентировочная стоимость (Время доставки и итоговая стоимость согласуются индивидуально с каждым клиентом):
Товар весом до 10 кг - 500 ₽
Товар весом свыше 10 кг - 800 ₽
Доставка в любой регион РФ почтой России и транспортными компаниями: СДЭК, 5POST, Boxberry, Деловые линии, DPD.
Стоимость доставки зависит от города назначения и размера посылки. Вы можете самостоятельно рассчитать стоимость доставки на сайтах транспортных компаний.
Самовывоз по адресу г. Москва Варшавское ш., д.26, стр. 10
Выдача товара производится согласно графика работы:
Пн-Чт: с 9:00 до 18:00
Пт: с 9:00 до 17:00
Обед с 13:00 до 14:00 - выдача товара не производится.
Оплата только безналичным способом!
Мы не работаем с наличным расчетом
Мы не работаем с наличным расчетом
Вы можете оплатить заказ следующими способами:
- Онлайн оплата банковской картой (Visa, MasterCard, МИР, Union Pay) через процессинговый центр ПАО «Сбербанк».
- Через систему быстрых платежей (СБП) по QR-коду.
- Через агрегаторов платежных систем Ю-касса или LifePay.
- В личном кабинете «Сбербанк Онлайн» в разделе «Переводы и платежи», «Перевод организации».
- Лично в отделении банка при предъявлении распечатанного счета.
Slamtec RPLIDAR A1 Laser Ranging Sensor, 360° Omnidirectional Lidar
RPLIDAR A1
360°Laser Ranging Lidar

Specifications
| Ranging Distance | 0.15 ~ 12.00 m |
|---|---|
| Ranging Accuracy | 1% of actual distance (≤3 m) 2% of actual distance (3~5 m) 2.5% of actual distance (5~12 m) |
| Scanning Frequency | 5.5 Hz |
| Scanning Angle | 360° |
| Ranging Frequency | 8000 Hz |
| Resolution | ≤ 1% of actual distance (≤12 m) ≤ 2% of actual distance (within 12~16 m) |
| Wavelength | 785 nm |
| Communication Interface | UART |
| Power Supply | 5 V |
| Power Consumption | 0.5 W |
| Operating Current | 100 mA |
| Weight | 248 g |
| Operating Temperature | 0°C ~ 40°C |
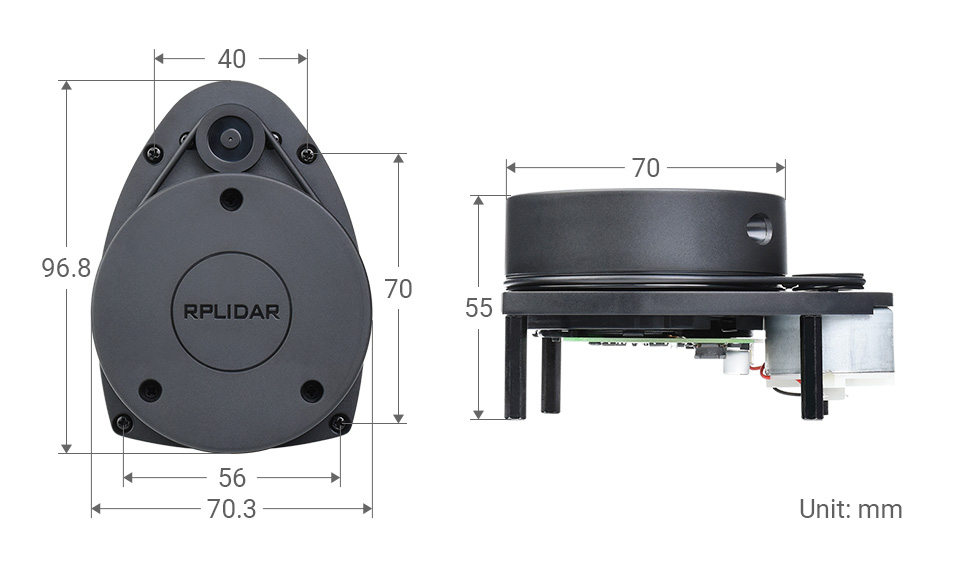
| Dimensions(L × W × H) | 96.8 × 70.3 × 55.0mm |
Laser Triangulation Technology
With High-speed Visual Acquisition and ProcessingMeasures Distance Data in More Than 8000 Times Per Second
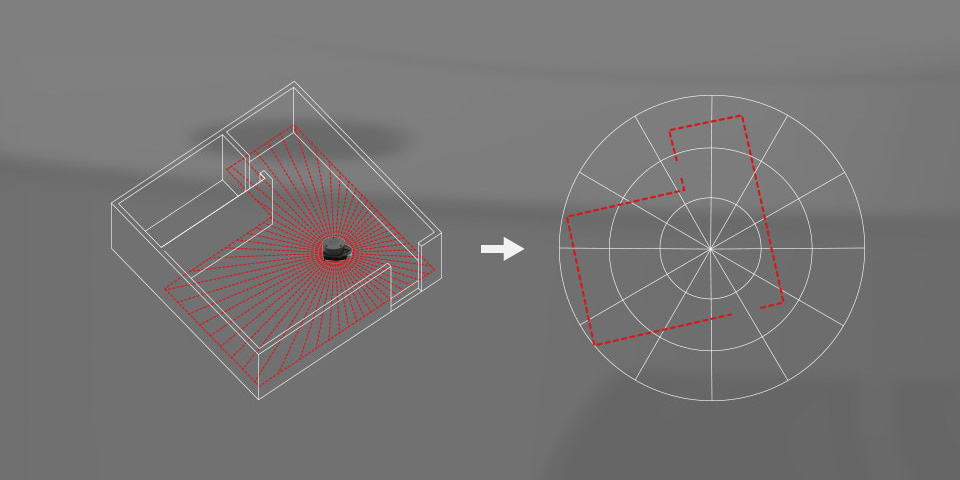
360° Omnidirectional Laser Scanning
Rotates clockwise in the ranging core to achieve 360-degree scanning and ranging of the surrounding environment, thus obtaining the contour map of the surrounding environment

Upgraded Optical Design and Algorithm System
Improves the internal optical design and algorithm system to make the sample rate up to 8000times/s, which can enable your robots to map faster and more accurately
Comparison under different working modes
10Hz 8000 Points
10Hz 4000 Points
5Hz 2000 Points
OPTMAG Original Design
Most traditional non-solid LIDARs use slip ring to transfer power and data information, however, they only have thousands of hours lifetime due to mechanical wear and tear. RPLIDAR A1 has integrated the wireless power and optical communication technology to self-design the OPTMAG technology, which breakouts the life limitation of traditional LIDAR system. It fixes the electrical connection failure caused by the physical wearing out so as to prolong the life-span.
Configurable Scan Rate from 2-10 Hz
Users can adjust the scan rate by motor PWM signal
Applications
Robot Simultaneous Localization And Mapping (SLAM)
Environment Scanning and 3D Reconstruction

Obstacle Detection and Avoidance
Multi-touch and Human Computer Interaction
Rich technical documentation support
Datasheet, User Manual, Application Manual, Protocol Specification
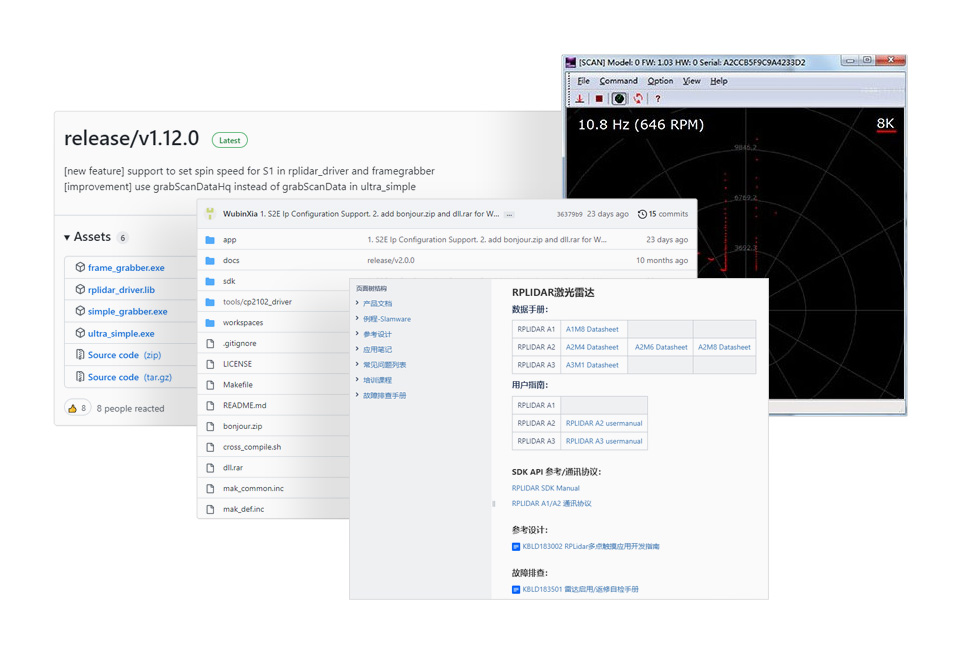
SDK & Demo Support
Outline dimensions
Resources & Services


* Resources for different product may vary, please check the wiki page to confirm the actually provided resources.
Product Selection
| Product | RPLIDAR A1 | DTOF LIDAR LD19 | Triangulation LiDAR LD14 |
|---|---|---|---|
| RANGING DISTANCE | 0.15 ~ 12.00 m | 0.02 ~ 12.00 m | 0.15 ~ 8.00 m |
| RANGING ACCURACY | 1% of actual distance (≤3 m)2% of actual distance (3~5 m)2.5% of actual distance (5~12 m) | ±45 mm (within 0.3 ~ 12.00m) | 5mm (< 1 m)1.5% of actual distance (1~6 m)2% of actual distance (6~8 m) |
| SCANNING FREQUENCY | 5.5 Hz | 5 ~ 13 Hz (Typ 10) | 6 Hz |
| SCANNING ANGLE | 360° | 360° | 360° |
| RANGING FREQUENCY | 8000 Hz | 4500 Hz | 2300 Hz |
| RESOLUTION | ≤ 1% of actual distance (≤12 m)≤ 2% of actual distance (within 12~16 m) | 15 mm | ≈ 20 mm |
| WAVELENGTH | 785 nm | 895 ~ 915 nm (Typ 905) | 775 ~ 793 nm (Typ 800) |
| COMMUNICATION INTERFACE | UART | UART | UART |
| POWER SUPPLY | 5 V | 5 V | 5 V |
| POWER CONSUMPTION | 0.5 W | ≈ 0.9 W | ≈ 1.3 W |
| OPERATING CURRENT | 100 mA | 180 mA | 240 mA |
| WEIGHT | 248 g | 47 g | 143 g |
| OPERATING TEMPERATURE | 0°C ~ 40°C | -10°C ~ 40°C | -10°C ~ 40°C |
| DIMENSIONS(L × W × H) | 96.8 × 70.3 × 55.0mm | 54.00 × 46.29 × 34.80mm | 96.3 × 59.8 × 38.80mm |
Комплект поставки

Бренд
Нет отзывов
Популярные товары
Хит
Товар дня
Доставка в течение 1 дня


Хит

Доставка в течение 1 дня
Хит

Доставка в течение 1 дня
Хит
Товар дня

Доставка в течение 1 дня
Хит

Доставка в течение 1 дня