Электроника
Смотреть все
Электроснабжение и СКС
Смотреть все
Оборудование и инструмент
Смотреть все
Средства разработки электроники
Смотреть все
Телекоммуникации и связь
Смотреть все
Электронные компоненты
Смотреть все
Электромеханические компоненты
Смотреть все
Акустические компоненты
Смотреть все
Оптоэлектроника
Смотреть все
Корпусные и установочные изделия
Смотреть все
Источники питания
Смотреть все
Кабельная продукция
Смотреть все
Компенсация реактивной мощности
Смотреть все
Освещение
Смотреть все
Пожарно-охранные системы
Смотреть все
Промышленная коммутация
Смотреть все
Щитовое оборудование
Смотреть все
Электроустановочные изделия
Смотреть все
Измерительные приборы
Смотреть все
Паяльное оборудование
Смотреть все
Электроинструмент
Смотреть все
Ручной инструмент
Смотреть все
Измерительный инструмент
Смотреть все
Расходные материалы
Смотреть все
Пневмоинструмент
Смотреть все
Компьютерное оборудование
Смотреть все
Станки
Смотреть все
Оснастка для инструмента
Смотреть все
Домашняя электроника
Смотреть все
Датчики
Смотреть все
Диоды
Смотреть все
Дроссели и индуктивности
Смотреть все
Компоненты подавления ЭМП
Смотреть все
Конденсаторы
Смотреть все
Микросхемы
Смотреть все
Полупроводниковые модули
Смотреть все
Резисторы
Смотреть все
Резонаторы, генераторы и фильтры
Смотреть все
Тиристоры (триаки)
Смотреть все
Транзисторы
Смотреть все
Трансформаторы
Смотреть все
Устройства защиты, предохранители
Смотреть все
Кабельные наконечники и клеммы
Смотреть все
Клеммники
Смотреть все
Панельки и зажимы для компонентов
Смотреть все
Переключатели, кнопки
Смотреть все
Переходники
Смотреть все
Разъёмы и соединители
Смотреть все
Реле
Смотреть все
Дисплеи, индикаторы и тачскрины
Смотреть все
Светодиоды
Смотреть все
Фоточувствительные элементы
Смотреть все
Аксессуары для кабеля
Смотреть все
Лампы осветительные
Смотреть все
Вспомогательное оборудование
Смотреть все
Газовые паяльники и горелки
Смотреть все
Запчасти к паяльному оборудованию
Смотреть все
Расходные материалы для пайки
Смотреть все
Пилы, электрические ножницы
Смотреть все
Шлифмашины
Смотреть все
Абразивный инструмент
Смотреть все
Оптические приспособления
Смотреть все
Приспособления для хранения
Смотреть все
Режущий инструмент
Смотреть все
Слесарный инструмент
Смотреть все
Шарнирно-губцевый инструмент
Смотреть все
Электромонтажный инструмент
Смотреть все
Химические средства
Смотреть все



Изображение служит только для ознакомления, перед покупкой уточняйте точные характеристики в технической документации!
УТ003265928
Нет отзывов
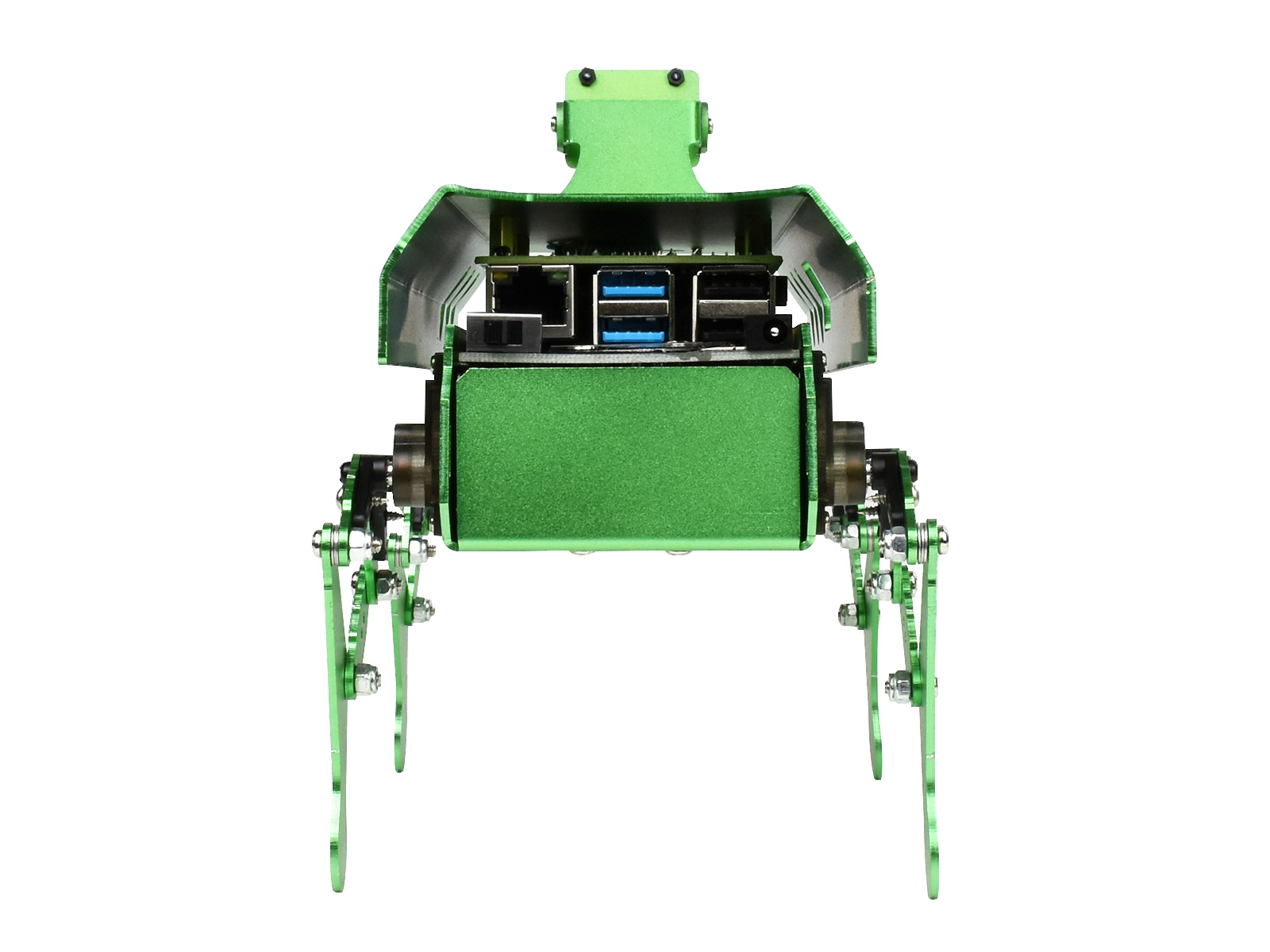
PIPPY-4B-2GB-KIT, Open Source Bionic Dog-Like Robot Powered by Raspberry Pi (Optional)
PIPPY-4B-2GB-KIT, Open Source Bionic Dog-Like Robot Powered by Raspberry Pi (Optional)
- Производитель: Waveshare Electronics
-
Под заказ
- Самовывоз через 6-8 недель
- Отправка возможна 4 июля
Минимальный заказ от 1 шт
Кратность заказа
1 шт
50 343,50 ₽
Доставка курьером по Москве (в пределах МКАД)
Ориентировочная стоимость (Время доставки и итоговая стоимость согласуются индивидуально с каждым клиентом):
Товар весом до 10 кг - 500 ₽
Товар весом свыше 10 кг - 800 ₽
Доставка в любой регион РФ почтой России и транспортными компаниями: СДЭК, 5POST, Boxberry, Деловые линии, DPD.
Стоимость доставки зависит от города назначения и размера посылки. Вы можете самостоятельно рассчитать стоимость доставки на сайтах транспортных компаний.
Самовывоз по адресу г. Москва Варшавское ш., д.26, стр. 10
Выдача товара производится согласно графика работы:
Пн-Чт: с 9:00 до 18:00
Пт: с 9:00 до 17:00
Обед с 13:00 до 14:00 - выдача товара не производится.
Оплата только безналичным способом!
Мы не работаем с наличным расчетом
Мы не работаем с наличным расчетом
Вы можете оплатить заказ следующими способами:
- Онлайн оплата банковской картой (Visa, MasterCard, МИР, Union Pay) через процессинговый центр ПАО «Сбербанк».
- Через систему быстрых платежей (СБП) по QR-коду.
- Через агрегаторов платежных систем Ю-касса или LifePay.
- В личном кабинете «Сбербанк Онлайн» в разделе «Переводы и платежи», «Перевод организации».
- Лично в отделении банка при предъявлении распечатанного счета.
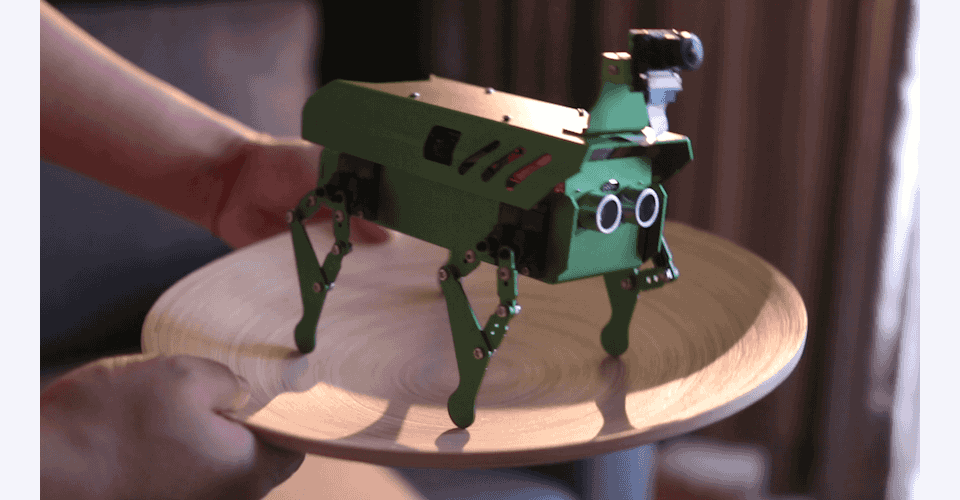
PIPPY, an open source bionic dog-like robot powered by Raspberry Pi (optional)
PIPPY quadruped robot
an open source bionic dog-like robot powered by Raspberry Pi
OpenCV, Python Programming, Visual Identification, Motion Algorithm

Raspberry Pi 4 controller

- BCM2711B064-bit 1.5GHz Quad-core Processor
- RAM2GB / 4GB / 8GB
- 4K Dual HDMI4K High Resolution Dual Displays
- Faster NetworkingGigabit ETH, Bluetooth 5.0, Dual-band WiFi
- New USB3.02xUSB3.0 + 2xUSB2.0
- USB-C PowerUpgraded Power Supply, More Powerful
Note: the Raspberry Pi and MicroSD card are optional.
Bionic dog-like robot
effortless connecting rod structure, motion inverse-solved gait algorithm, capable of performing sorts of gaits and functionalities
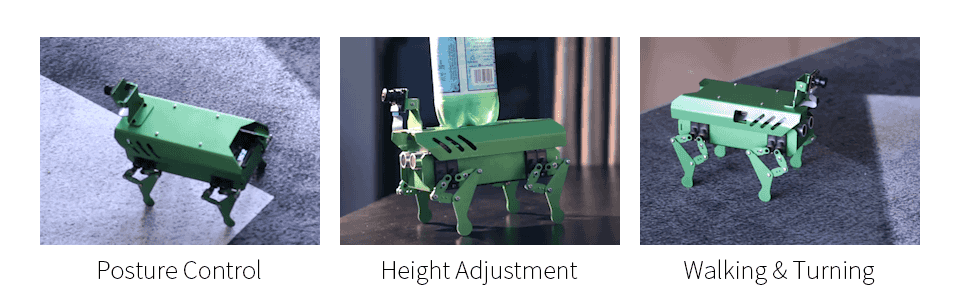
Posture self-balancing
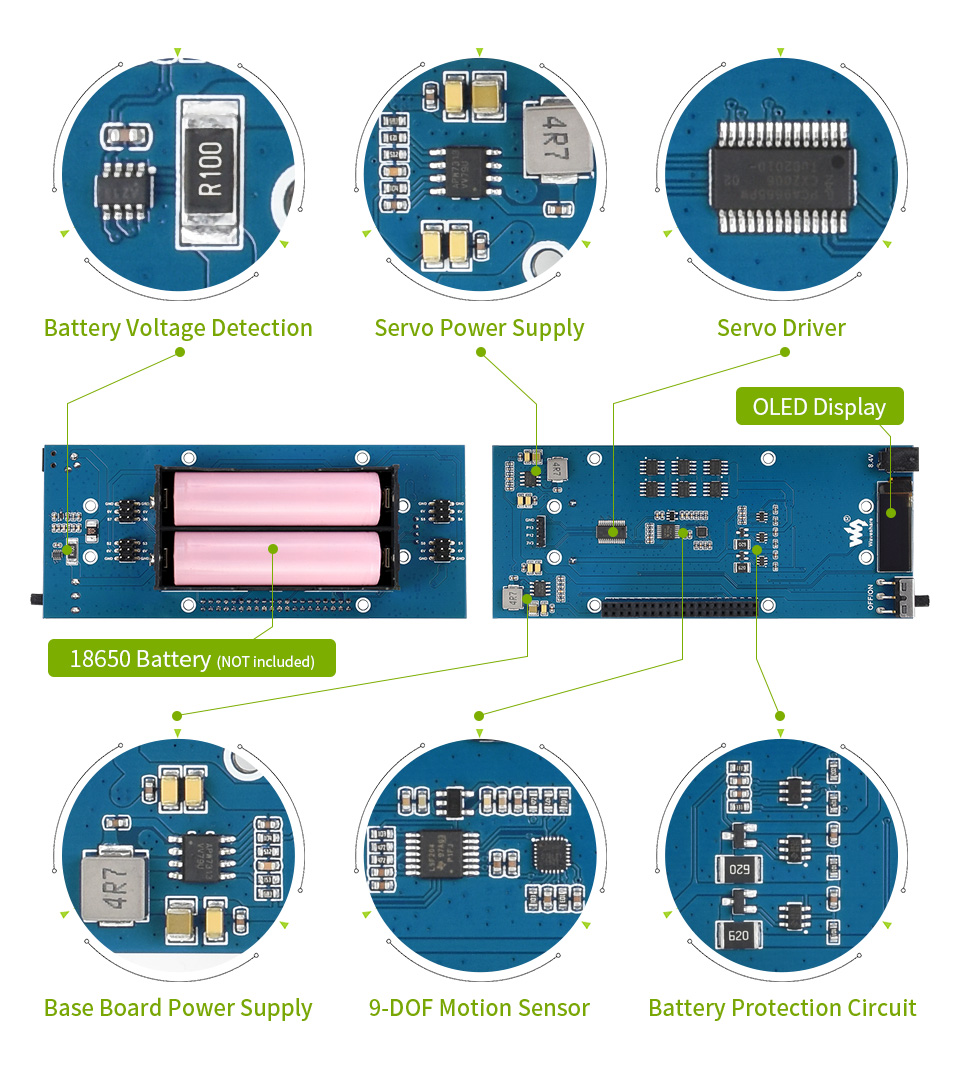
embedded high precision 9-DOF motion sensor ICM20948(3-axis accelerometer, 3-axis gyroscrope, 3-axis magnetometer)accommodating to different terrains, featuring self-balancing capability, keeping the camera stable
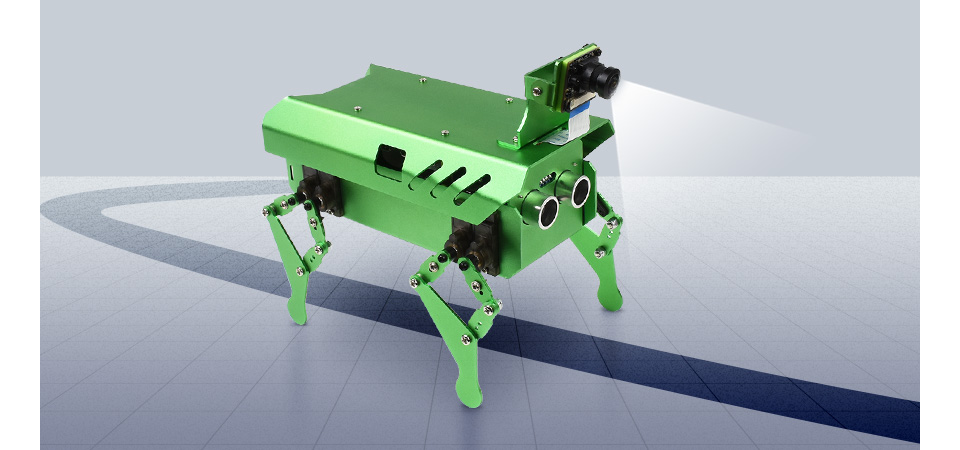
5MP 160° wide angle camera
quality OV5647 sensor
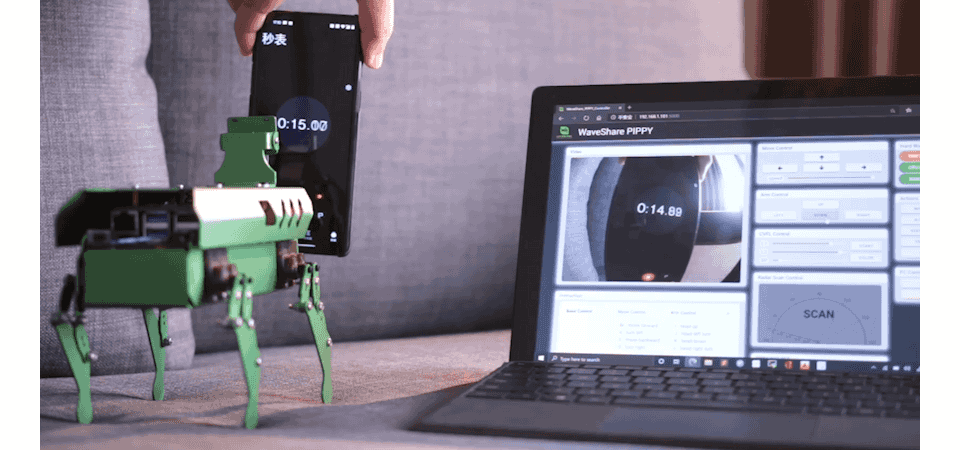
Video MonitoringHigh definition, low latency, real time video monitoring through the camera
Vision-based Line FollowingAfter OpenCV image binarization process, getting the stray value by comparing the positions of image center line, which will be then used to control the movement of the robot, make it keep following the line.
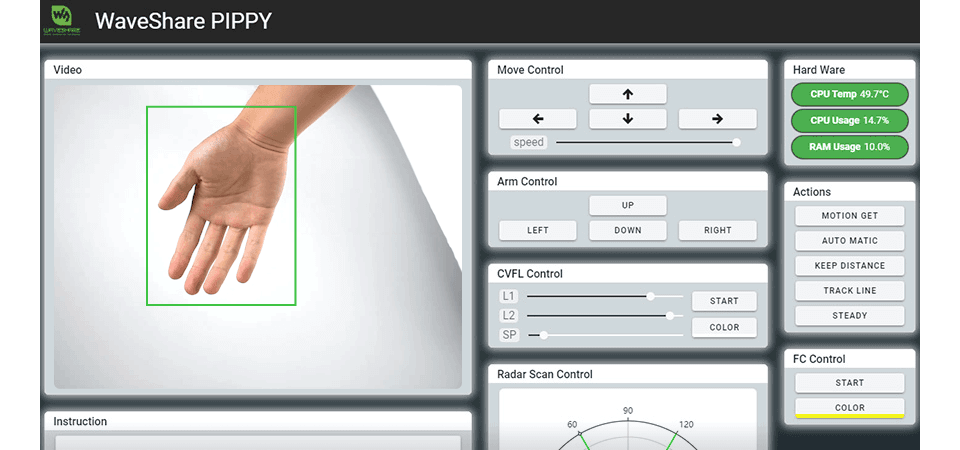
Motion DetectionCapturing moving objects in the video by detecting the video images from the camera
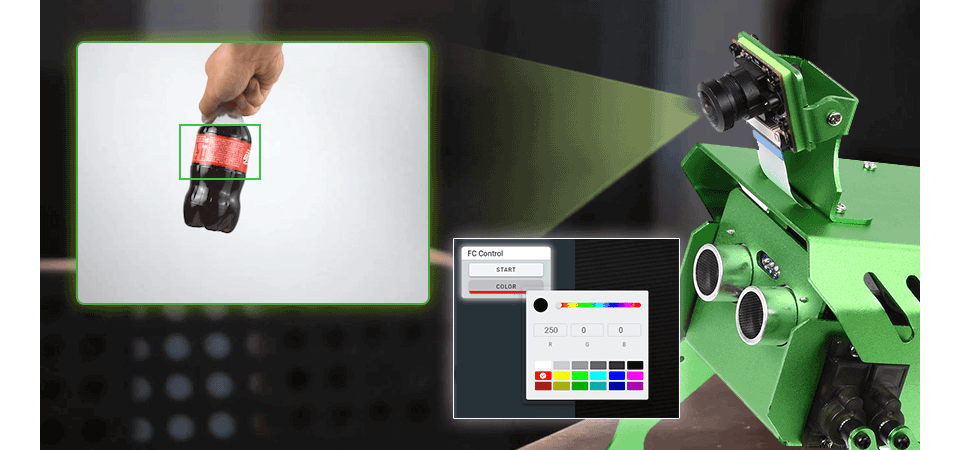
Color Recognition & TrackingAuto tracking specified color in the video image, allows different colors
Ultrasonic sensing
outfitted with Ultrasonic module for detecting and responsing to objects

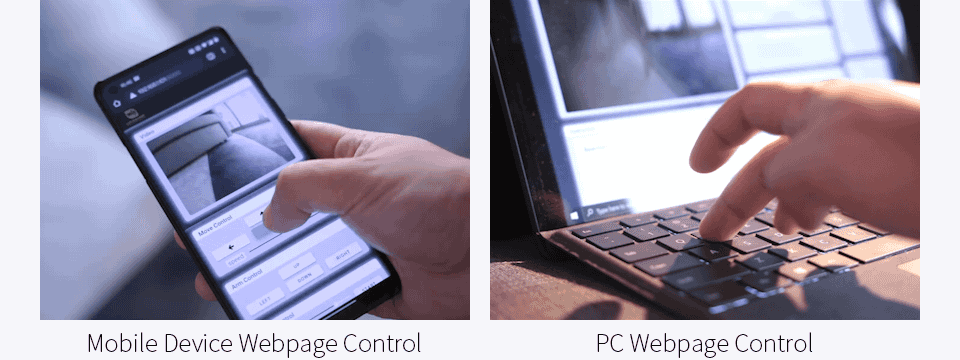
Multiple control methods
video postback, WiFi remote control
Highly integrated base board
Dimensions
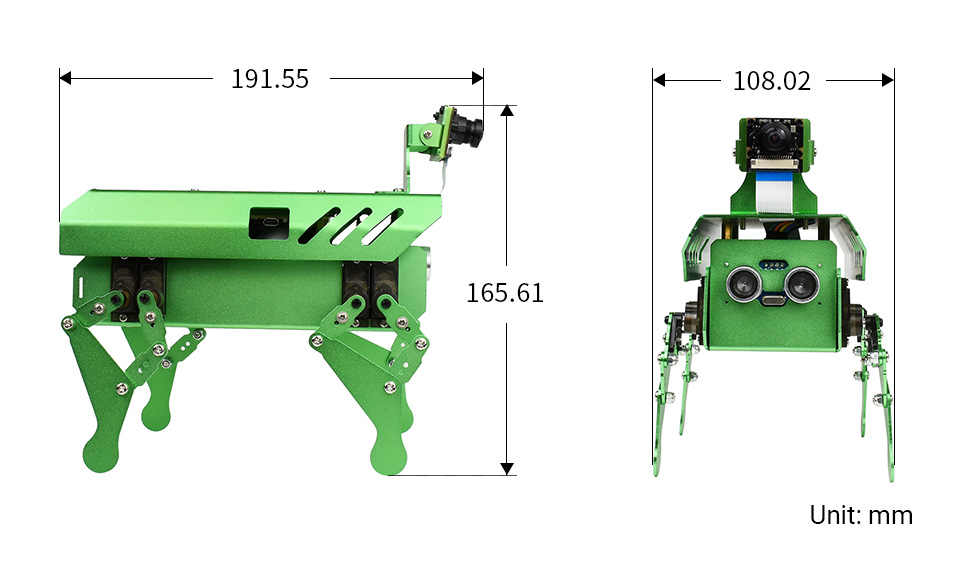
Specifications
| Controller | Raspberry Pi 4 Model B (optional) |
|---|---|
| OS | Raspberry Pi OS (Raspbian) |
| Language | Python |
| Camera | 5MP HD resolution, 160° FOV wide angle camera |
| Display | 0.91" OLED, 128×32 pixels |
| WiFi mode | AP mode (self-generated hotspot) / STA mode (connecting to a router) |
| Protection | over charge/discharge protection, over current protection, short circuit protection, reverse proof |
| Power supply | 8.4V, 2x 18650 battery in series, allows discharging while recharging (batteries NOT included) |
| Servo | micro metal gear servo |
| Material | aluminum alloy |
Resources & Services


* Resources for different product may vary, please check the wiki page to confirm the actually provided resources.
Комплект поставки
- The 18650 batteries are NOT included
- Please note that the battery length SHOULD be less than 67mm, some batteries with protection plate in the market are NOT supported, learn more
- OPTIONSPI4B
- OPTIONS Micro SD Card 16GB
- PIPPY metal box
- PIPPY base board
- RPi Camera (G)
- Acrylic camera spacer
- Ultrasonic module
- 4PIN jumper wire
- Mini cross wrench sleeve
- Micro SD card reader
- Micro metal gear servo x10
- Power adapter EU head
- 8.4V battery charger
- Screwdriver x2
- Screws and standoffs
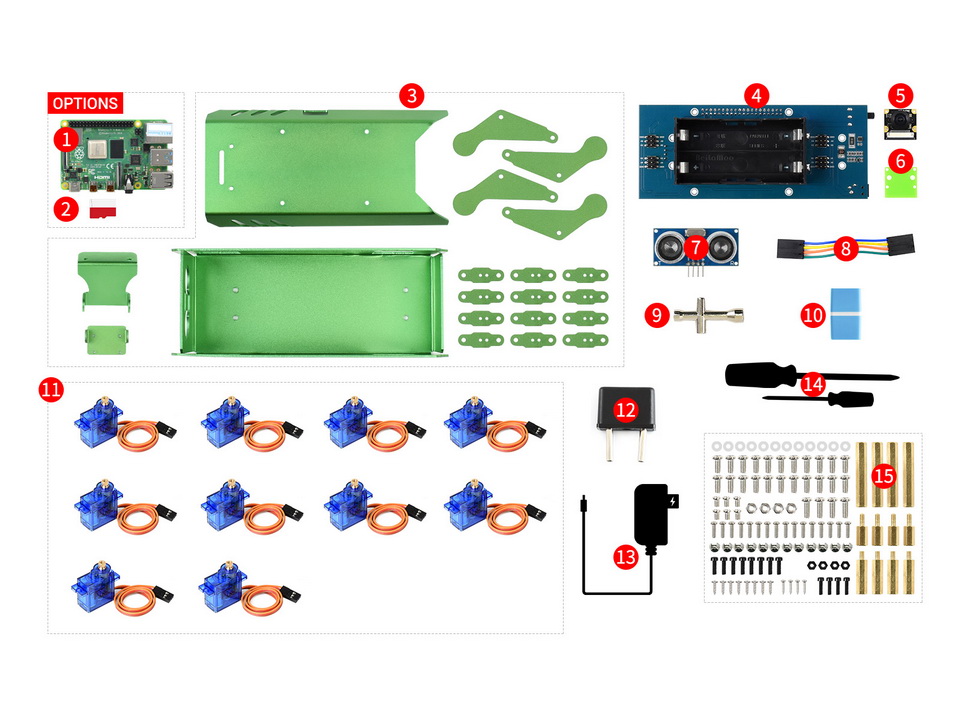
Part list change log:
- [2021-05-07] the 8x servo have been upgraded to 10x metal gear servo
Бренд
Производитель
Waveshare Electronics
Основная группа
Комплектующие для робототехники
Нет отзывов
Популярные товары
Хит

Доставка в течение 1 дня
Хит
Товар дня

Доставка в течение 1 дня
Хит

Доставка в течение 1 дня
Хит
Распродажа

Доставка в течение 1 дня